
Body
Variations in stroke make it difficult to diagnose, track, and treat patients. Technology-facilitated therapy, including use of robotics, affords new frontiers in customization. However, patients do not improve if technology dominates movement.
We have developed machine-assisted therapy techniques that focus on self-directed movement and error augmentation approaches (in which the computer distinguishes movement errors) to promote user engagement. We seek to apply these interventions using simple wearable devices that can function as collaborative machines.
Recently, we have prototyped design approaches that can generate a variety of spring and mass force fields for generating various desired torque fields. These new approaches are compelling because they are passive and do not require motors. They can potentially augment motion in a lightweight wearable form, and can easily switch from a challenging therapy mode to assistance when immediate functional ability is needed.
Within the current funding cycle (2018-2023), we will:
- Merge these approaches into two clinical, wearable augmenting exoskeletons — one made of springs, one made of masses
- Test their effectiveness in a randomized controlled test
- Participate in an observational study at the Shirley Ryan AbilityLab
Our Designs
Body
One such spring-actuated device we will develop is the multi-MARIONET, a passive soft robotic device that leverages the advantages of the original MARIONET design to create torques that are safe and smooth. Multiple springs allow custom-tailoring of the torque field for any desired shape by the clinician simply by summing the effects of each element, and make a non-motorized toque device possible. With rapid and simple adjustments, it can make up a patient’s deficits for easier function, or it can destabilize and hence augment errors for therapeutic training activity.
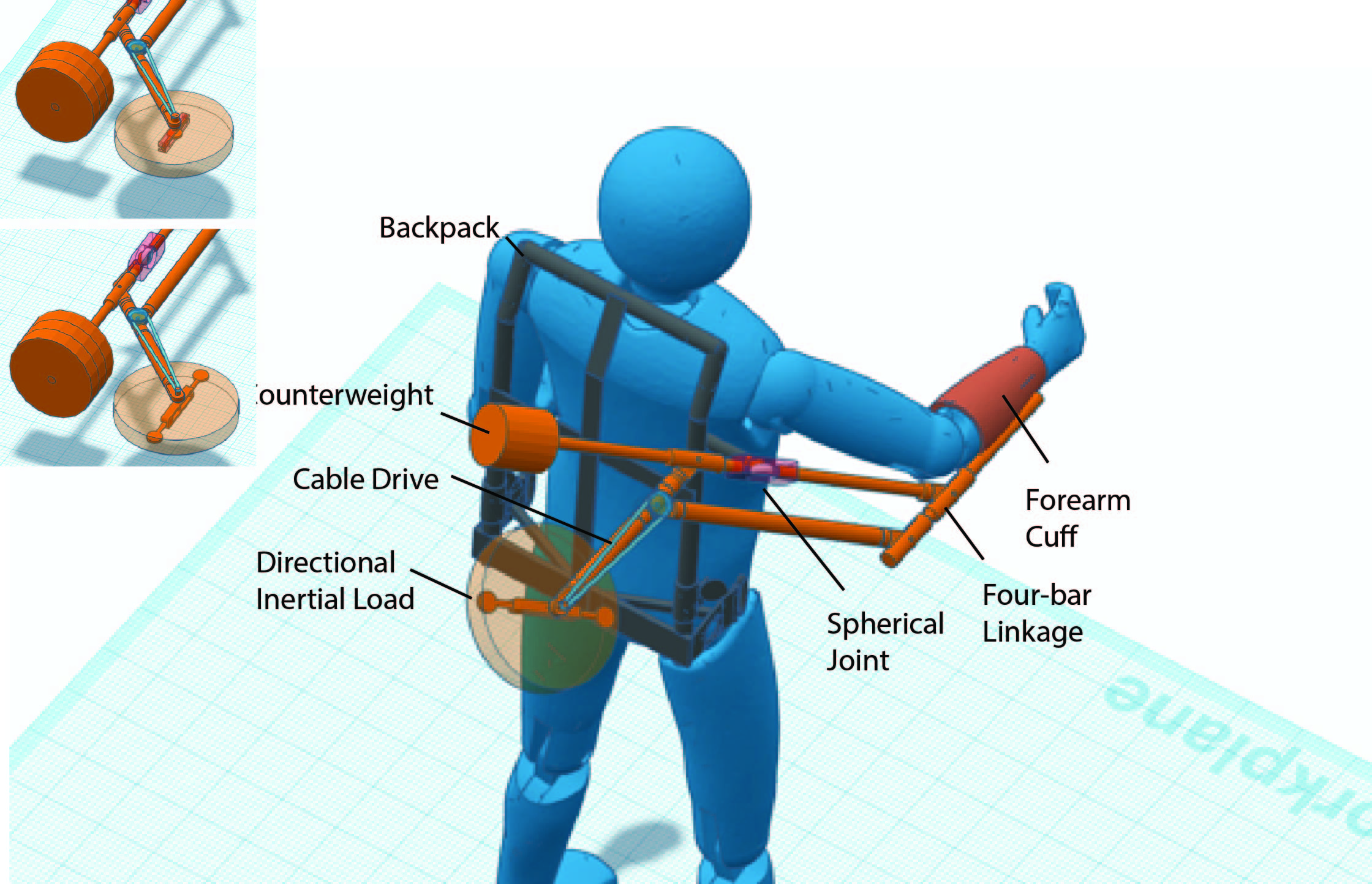
The other device, JACK (JAcobian Customized Kinesthetics), is a robot-based platform that can counteract or enhance the challenges of dynamic coordination of the arm using inertial force fields. We hypothesize that JACK can augment existing arm dynamics for strengthening or simplify dynamics to assist retraining coordination.
Team Members
Body
James Patton, PhD, Shirley Ryan AbilityLab and University of Illinois at Chicago
Felix Huang, PhD, Shirley Ryan AbilityLab and Northwestern University
Caitlin Newman, OTD, Shirley Ryan AbilityLab
Richard Harvey, MD, Shirley Ryan AbilityLab and Northwestern University
Sandro Mussa-Ivaldi, PhD, Shirley Ryan AbilityLab and Northwestern University
David Reinkensmeyer, PhD, University of California, Irvine
Derek Kamper, PhD, North Carolina State University
Conor Walsh, PhD, Harvard University
Heike Vallery, Dr.-Ing., Deft University of Technology
Body
The contents of this webpage were developed under a grant from the National Institute on Disability, Independent Living, and Rehabilitation Research (NIDILRR grant number 90REGE0005-01-00). NIDILRR is a Center within the Administration for Community Living (ACL), Department of Health and Human Services (HHS). The contents of this webpage do not necessarily represent the policy of NIDILRR, ACL, or HHS, and you should not assume endorsement by the Federal Government.