Body
The risk of falls in chronic stroke survivors is up to seven times higher than in the general older population. Balance problems are the number one important risk factor for falls. Robotic devices that provide adaptive balance interventions have been proposed but are usually limited to a specific task environment. For example, treadmill-based devices require permanent installation in a room while mobile overground body weight support systems require a moving frame that hinders physical access of therapists to patients.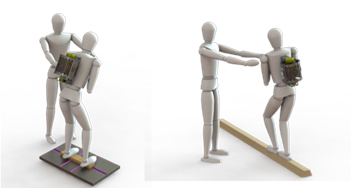
Within a past funding cycle, researchers at TU Delft and the Shirley Ryan AbilityLab developed a new type of actuation principle that enables wearable balance assistance in the form of gyroscopic actuators that can be integrated in an unobtrusive design (like a backpack) and that provides balance-assisting or balance-challenging force couples. Depending on the controller, the backpack may make balancing either harder or easier for individuals, enabling innovative types of training that can be integrated into clinical practice.
For the current funding cycle (2018-2023), we will:
- Develop a therapy-ready collaborative balance trainer
- Iteratively evaluate and improve usability and effectiveness
- Integrate the device and therapy strategies into an observational study at the Shirley Ryan AbilityLab
Team Members
Body
Heike Vallery, Dr.-Ing., TU Delft
Arun Jayaraman, PT, PhD, Shirley Ryan AbilityLab
Ruud Selles, PhD, Erasmus MC
Gerard Ribbers, MD, PhD, Erasmus MC/Rijndam Rehabilitation Centre
David Reinkensmeyer, PhD, University of California, Irvine
Bram Sterke, MSc, TU Delft & Erasmus MC
Daniel Lemus, MSc, TU Delft
Andrew Berry, MSc, TU Delft
Cor Meijneke, MSc, TU Delft
Related Publications & Patents
Body
Berry, Andrew, Daniel Lemus, Robert Babuška, and Heike Vallery. Directional singularity-robust torque control for gyroscopic actuators. IEEE/ASME Transactions on Mechatronics 21, no. 6 (2016): 2755-2763.
Li, Dustin, and Heike Vallery. Gyroscopic assistance for human balance. In Advanced Motion Control (AMC), 2012 12th IEEE International Workshop on, pp. 1-6. IEEE, 2012.
Vallery, Heike, and Dustin Juhn-Yin Li. Gyroscopic-assisted device to control balance. U.S. Patent Application 13/803,902, filed September 18, 2014.
Body
The contents of this webpage were developed under a grant from the National Institute on Disability, Independent Living, and Rehabilitation Research (NIDILRR grant number 90REGE0005-01-00). NIDILRR is a Center within the Administration for Community Living (ACL), Department of Health and Human Services (HHS). The contents of this webpage do not necessarily represent the policy of NIDILRR, ACL, or HHS, and you should not assume endorsement by the Federal Government.